Roboter als Vogel getarnt wird als Spion ins Tierreich geschickt

Forschende der ETH Lausanne haben einen äusser interessanten Roboter entwickelt: Als Vogel getarnt soll er das Tierreich ausspionieren.
Das Wichtigste in Kürze
- EPFL-Forschende haben einen Roboter entwickelt, der wie ein Vogel fliegen kann.
- Dieser soll künftig Tiere beobachten und Proben in der Natur sammeln.
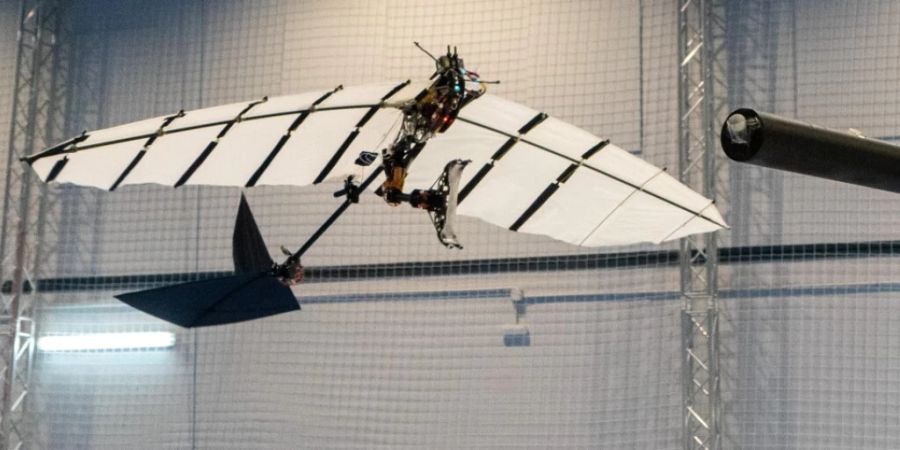
Forscher der Eidgenössischen Technischen Hochschule Lausanne (EPFL) haben einen Roboter entwickelt, der wie ein Vogel fliegen und auf einem Ast landen kann. Künftig soll der Vogelroboter Tiere beobachten und Proben in der Natur sammeln.
Bisher waren Roboter, die wie Vögel mit Flügeln schlagen, um zu fliegen, nicht in der Lage, zu landen, hiess es in einer Mitteilung der EPFL vom Montag zum kürzlich im Fachblatt Nature Communications erschienenen Artikel.
Der 700 Gramm schwere Vogelroboter der EPFL ist der erste seiner Art, dem dies gelingt. Er kann eine horizontale Stange selbstständig anfliegen und sich mit seinen mechanischen Klauen daran festhalten.

Roboter ideal für Naturbeobachtungen
Da sich der Roboter ohne Propeller leiser und unauffälliger bewegen kann als etwa Drohnen, sei er ideal für Naturbeobachtungen, schrieben die Autoren in der Studie. Auch für Inspektionen von Rohren oder Stromleitungen in Gebieten, in denen Wildtiere leicht gestört würden, sei ein sogenannter Ornithopter ideal.
So einfach es in der Natur auch aussieht: Das Landen eines Vogels auf einem Ast ist ein komplexes Manöver. Der Ornithopter musste in der Lage sein, deutlich langsamer zu werden, ohne dabei abzustürzen. Die Klaue musste stark genug sein, um die Sitzstange zu greifen und das Gewicht des Roboters zu tragen, ohne so schwer zu sein, dass der Roboter abstürzt.

Weiter musste der Roboter in der Lage sein, seine Umgebung und die Sitzstange im Verhältnis zu seiner eigenen Position, Geschwindigkeit und Flugbahn wahrzunehmen. Dazu statteten die Wissenschaftler den Ornithopter mit einem vollständigen Bordcomputer und einem Navigationssystem aus.
Der Haken: Vorerst konnte der Roboter die Landung nur in Räumen durchführen. Im Freien schaffte es der Ornithopter noch nicht, einen Ast in ausreichender Genauigkeit zu lokalisieren.